AutoInfra: Infrastructuur voor autonome voertuigen


Via het “AutoInfra"-project hebben we testinfrastructuur gerealiseerd op de Flanders Make Lommel site voor co-creatie, validatie en demonstratie van autonome mobiele (transport)systemen met een focus op simulatiemodellen voor validatie van besturings- en perceptie-algoritmes en het capteren van perceptiedata in reële werkomstandigheden.

In een moderne, intelligente bedrijfsomgeving gaan machines, productie- en transportsystemen steeds meer autonoom werken. Dat laat toe om ze efficiënter in te zetten en processen kwaliteitsvoller te maken. De transitie naar autonome mobiele systemen vormt enerzijds een grote opportuniteit voor bedrijven, anderzijds brengt ze ook heel wat uitdagingen met zich mee. Dit zowel voor de ontwikkelaars van de nieuwe technologie, als voor de gebruikers van de nieuwe producten.
Zelfrijdende voertuigen en alle andere autonome mobiele systemen moeten in staat zijn om veilig te werken in alle omstandigheden en hiervoor elke veranderende omstandigheid in de omgeving juist waar te nemen, juist te interpreteren en de juiste actie te ondernemen. In de ontwikkelingscyclus van autonome mobiele systemen is het belangrijk om zo snel mogelijk over reële perceptiedata te beschikken en om zo veel mogelijk simulatiemodellen in te zetten bij het ontwikkelen en verbeteren van de software en onderliggende algorithmes.
Beschikbare infrastructuur
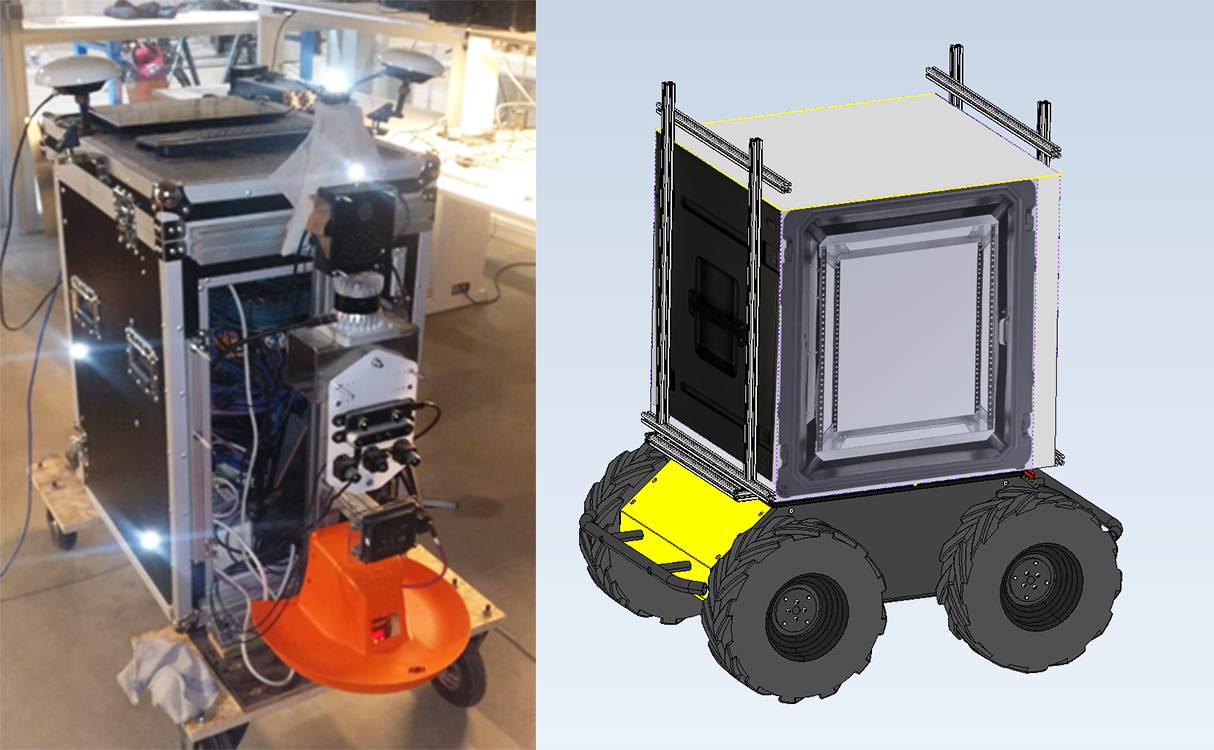
Binnen het AutoInfra-project heeft Flanders Make infrastructuur opgebouwd voor het capteren van perceptiedata in reële omstandigheden. De mogelijkheden voor de infrastructuur omvatten de captatie van:
- GPS-RTK data, met een positienauwkeurigheid van 1cm
- 6 cameras voor zowel een 360-graden beeld als stereo-beelden
- Lidar-sensoren
- Radar-sensoren
- Innovatieve types sensoren gebaseerd op ultrasoon, geluids. Laser of licht-principes
Specifiek voor de robustheid van outdoor mobiele systemen, moeten de perceptiesystemen ook getest worden in extreme weersomstandigheden. Daartoe is het captatiesysteem aangepast om:
- Te functioneren bij regen en mist
- Extreme zon- en belichtingssituaties
Om de werkingsradius van het captatiesysteem uit te breiden is voorzien om het zowel manueel, op een autonome outdoor-AGV als op een heftruck of tractor met frontlader te kunnen monteren en te laten bewegen.
De ontwikkelings- en validatietijd en kost voor een autonoom mobiel systeem is substantieel en kan verminderd worden door gebruik te maken van realistische simulatie bij de ontwikkeling van software en algoritmes voor perceptie en controle. Flanders Make heeft een selectietool opgesteld voor de selectie van het beste simulatie-platform in functie van de vereisten voor nauwkeurige visuele simulatie en foto-realistische beelden en nauwkeurige bewegingssimulatie van het autonome voertuig. Bij de selectie wordt gekozen tussen simulatiepaketten met een lage instapdrempel zoals Unreal, Airsim, Unity en Gazebo.

Voor de voorgestelde simulatie-platformen zijn er simulatiemodellen gemaakt van de relevante infrastructuur bij Flanders Make, dit omvat zowel de gebouweninfrastructuur als de autonome voertuigen. Voorbeelden hiervan zijn de autonome heftruck in de indoor logistieke omgeving en de autonome tractor met frontlader in de outdoor veld-omgeving.
