Robotica, Sensoren en Actuatoren
We doen geavanceerd onderzoek naar kerncomponenten van robots en slimme machines. Die voelen hun omgeving (sensing), verwerken signalen en voeren acties uit.

We focussen op
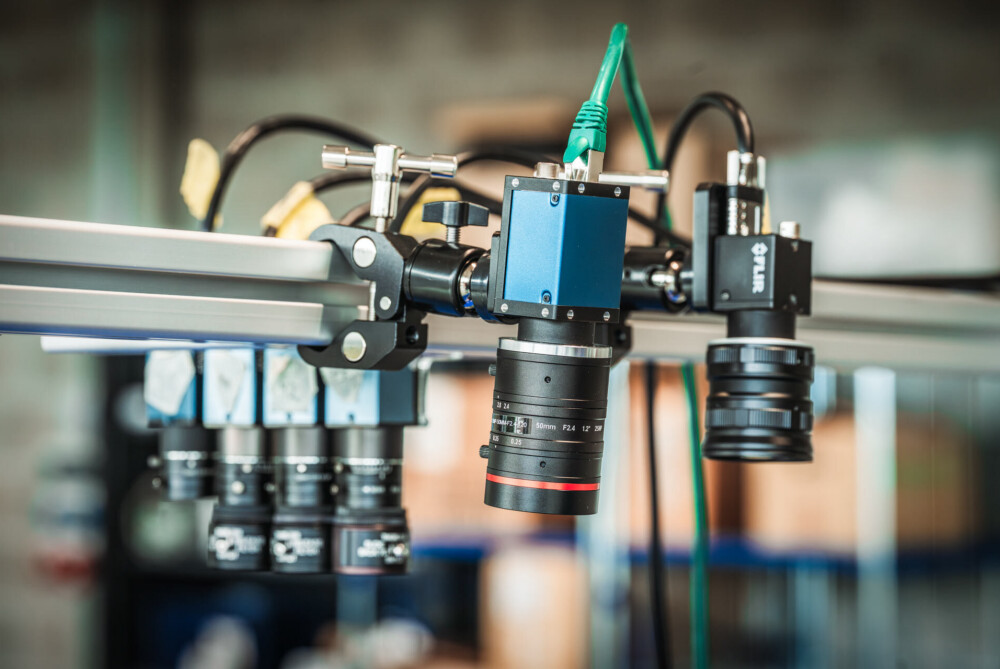
Meetinstrumenten en -methodes
We ontwikkelen technologieën voor de instrumentatie en meting van fysische signalen. Onze meetinstrumenten kunnen actief of passief, op afstand of in-situ worden toegepast, met metrologie als essentieel onderdeel.
Ons onderzoek richt zich op de selectie, configuratie en kalibratie van uiteenlopende sensoren, zoals hyperspectrale camera’s, inertial measurement units (IMU’s) en Fiber Bragg Grating-sensoren.
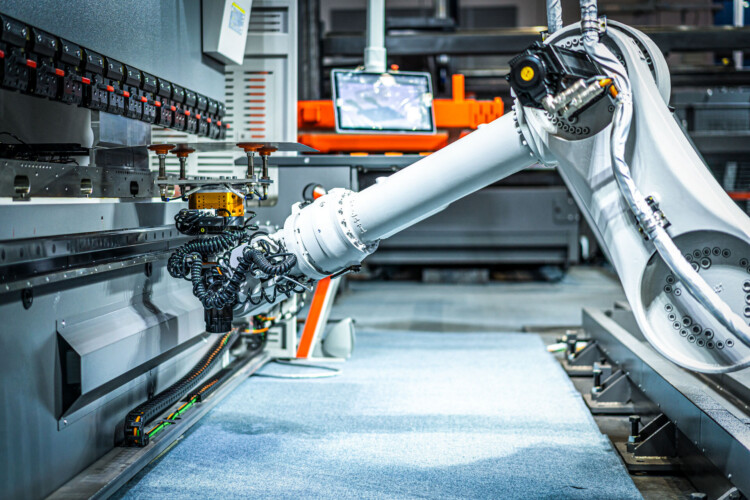
Robotmanipulatie
We ontwikkelen hardwaretechnologieën die robots in staat stellen objecten nauwkeurig te hanteren en te manipuleren. Daarbij moet de robot niet alleen de grijper exact positioneren, maar ook de grijphandeling betrouwbaar uitvoeren.

Wens je meer informatie?
Gerelateerde testinfrastructuur

Testen van elektr(on)ische componenten
Voor mechanische en thermische testen van elektr(on)ische componenten.

Make Lab
Mobiel onderzoekslabo tot de nok gevuld met toptechnologie.

Ontwikkeling en prototyping van photonische componenten
State-of-the-art pilootlijn voor vrije-vorm optica.

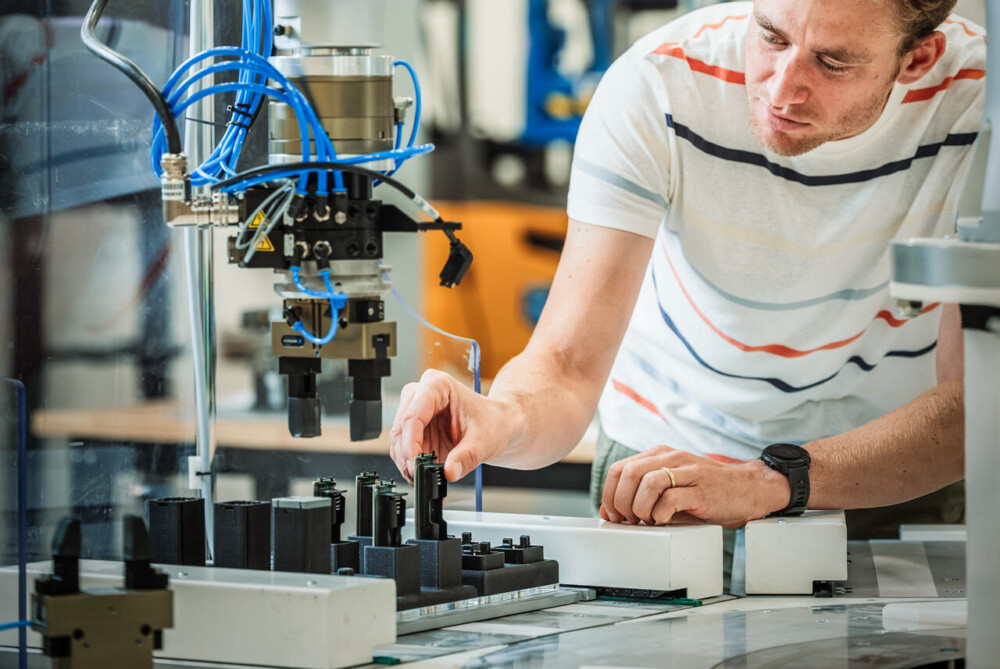
Robot gripper technologie
Voor de selectie, ontwikkeling en optimalisatie van aangepaste grijpers, robottooling en sensoriek.



Andere technologieën

Energiecomponenten en -systemen
Voor het verbeteren van elektrische machines, batterijen, vermogenselektronica, transmissies en thermo-fluïde energiesystemen.

Productie, mechanische componenten & systemen
Voor het optimaliseren van mechanische componenten en systemen, hun prestaties, duurzaamheid en productieprocessen.

Employee 5.0 systemen
Voor meer welzijn en productie.

Situational & self-awareness technologieën
Voor het identificeren, analyseren en evalueren van zowel omgevingscondities als systemen.

Reasoning en Acting Technologieën
Voor intelligente beslissingen en het orkestreren van (autonome) acties.

System-of-Systems technologieën
Voor een naadloze interactie, coördinatie en efficiëntie in complexe industriële omgevingen.

Business, duurzaamheid & operations management
Voor het optimaliseren van de operaties, duurzaamheid en waardecreatie van bedrijven.