AI-testbed voor mechatronica en robotica
We doen onderzoek op het snijvlak van systeemidentificatie, besturing en machinaal leren voor mechatronische en industriële robotsystemen. Daarom zijn er een aantal robot hardware setups beschikbaar in een van onze labs, evenals een web winding machine/fysieke demonstrator op TRL (technology readiness level) 5 à 6.
Locatie: FlandersMake@UGent
Industriële folie wikkelmachine
In het licht van Industrie 4.0 worden AI-gebaseerde technologieën geleidelijk maar in toenemende mate overgenomen door de industrie (op het gebied van machinebouw, energietoepassingen, robotica en automotive toepassingen) om hun concurrentievermogen te behouden en te vergroten.
We hebben onlangs een foliewikkelmachine (TRL 5-6) en een virtueel model ontworpen en gebouwd om nieuwe AI-gebaseerde software prototype tools & routines voor systeemidentificatie, conditiebewaking, foutvoorspelling en geavanceerde controle te valideren en te demonstreren.
Deze fysieke demonstrator is zo geconceptualiseerd dat hij een voldoende brede relevantie heeft voor de productie-industrie met voldoende variabiliteit in de systeemparameters, waardoor waardevolle gelabelde sensorgegevens gegenereerd kunnen worden die nodig zijn voor AI-toepassingen en Digital Twin-ontwikkeling.
De wikkelmachine bestaat uit een wikkelgroep, tractiegroep, danser, accumulator en een uitlijngroep:
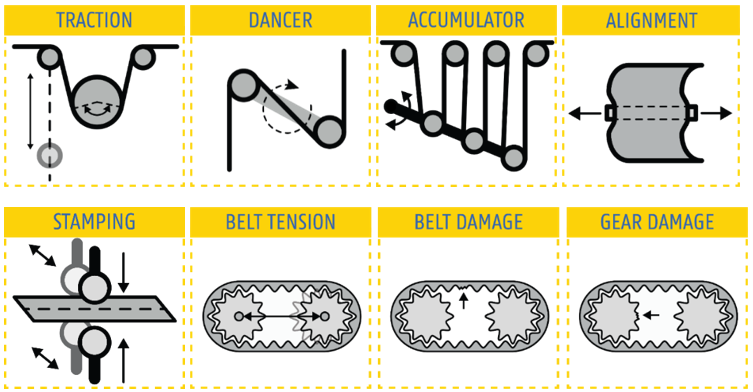
De mogelijkheid om variabiliteit te introduceren in de wikkeldynamica maakt het mogelijk om geavanceerde regeltechnieken te testen, terwijl variabiliteit in de wikkelkwaliteit het mogelijk maakt om besluitvormingsmethoden te testen met proces in de lus. Verder is het ook mogelijk om variabele mechanische storingen in te voeren met betrekking tot het stempelmechanisme, de riemtransmissie en de lagerondersteuning, zodat tools voor conditiebewaking getest kunnen worden.
Ons aanbod
Bij het implementeren of ontwikkelen van uw eigen nieuwe AI-gebaseerde softwareprototype tools, bijvoorbeeld voor systeemidentificatie, conditiebewaking, foutvoorspelling, kwaliteitscontrole en geavanceerde besturing, is vaak een fysieke opstelling nodig om uw softwareprototype te valideren en te demonstreren met betrekking tot prestaties, robuustheid, efficiëntie enz.
Onze robotica-infrastructuur en industriële foliewikkelmachine met hoge TRL maken precies dat mogelijk: we bieden productie- en servicebedrijven de mogelijkheid om hun eigen AI-softwareroutines te valideren, te laten uitrijpen en te demonstreren op onze fysieke robotica- en foliewikkelmachine-demonstrator (tot TRL 5-6) in een veilige omgeving. Dit omvat:
- Het experimenteel evalueren van uw softwarealgoritmen (systeemidentificatie, conditiebewaking, foutvoorspelling, kwaliteitscontrole, geavanceerde besturing...) met het oog op prestaties, robuustheid en efficiëntie;
- Evaluatie en ondersteuning voor cloud-gebaseerd of edge-gebaseerd ontwerp;
- Mogelijkheid om je eigen sim2real, impedantieregeling (Unitree A1) te ontwikkelen en te testen;
- Mogelijkheid om je eigen haptische besturing te ontwikkelen en te testen (robotarm assemblage);
- Een bibliotheek met gelabelde experimentele datasets die gebruikt kunnen worden voor training, benchmarking, identificatie en validatie, inclusief gegevens over zowel normale werking als foutieve werking (door middel van foutemulatie). We kunnen nieuw gegenereerde datasets leveren op basis van uw specifieke behoeften;
- Mogelijkheid tot kennisoverdracht en samenwerking op basis van onze expertise en controlemethodes/AI-toolboxes toegepast op uw specifieke geval;
- Op verzoek kan de Unitree A1 vierpotige robot gehuurd worden voor een beperkte duur.