Autonomous drones in greenhouses: indoor navigation for crop yield prediction

Drones in Agriculture...
Developments in automation could also transform our agriculture sector. Given the low profit margins in agriculture, cost is a key challenge. Thus, drones come into the picture. These compact and lightweight technologies offer affordable potential for many interesting applications: think, for instance, of automatic inspection of crops and infrastructure or detection of diseases and pests. Applications capable of making our agriculture more efficient and cost-effective.
For this, however, we also have to take into account some major challenges:
- Legislation: The use of drones requires complex approvals and procedures, especially for outdoor use.
- Actual cost: Operational costs can still be high when specialised pilots are needed.
- Rapid technological developments: Gaining a long-term competitive advantage through customised drones is difficult.
In the light of the above challenges, we chose to develop a proof-of-concept for:
- Use in greenhouses
- Autonomous navigation
- Low-cost consumer drones

Indoor Autonomous Navigation in Greenhouses: A challenge
Deploying drones in greenhouses is not without its challenges. Limited space and lack of GPS signals require alternative navigation techniques. We tested several methods:
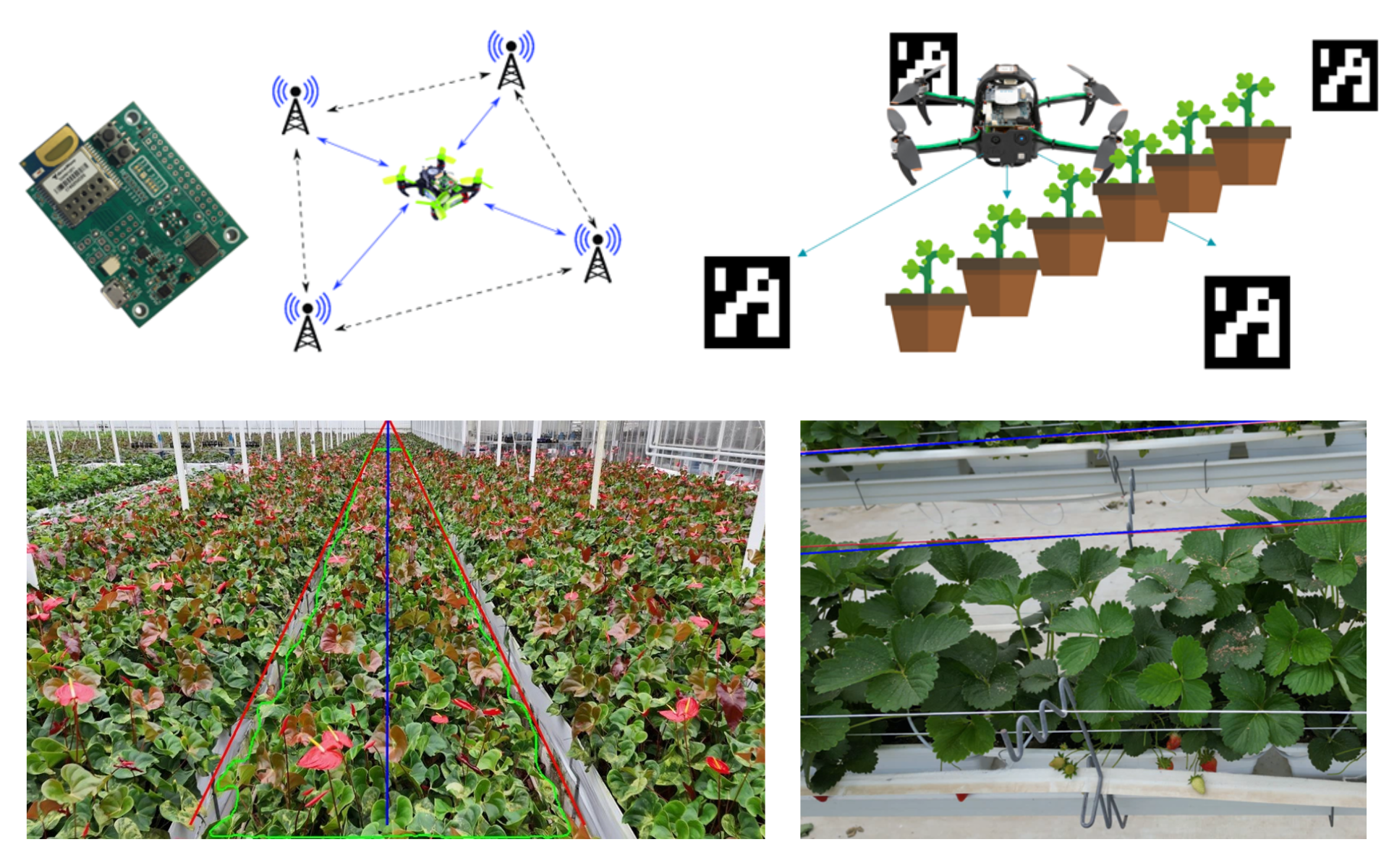
- Local GPS systems: Small transmitters (trays) in the greenhouse send signals to a receiver on the drone. By measuring time differences in reception, the position can be accurately determined. Although this system works, it is expensive and logistically challenging, especially in large greenhouses.
- Visual markers: Cameras on the drone detect visual markers placed in the greenhouse. The markers are cheaper than transmitters for a local GPS system, but need to be installed in large numbers so that a marker is always in view. To complement or replace markers, structural elements of the conservatory, such as columns and beams, can also be used as reference points: Structural Navigation. But both methods are flawed, because most consumer drones only have one camera that will need to be facing the plants for inspection.
But we can find a solution in the fact that greenhouse plants are usually arranged in clear rows. This brings us to the promising potential of:
- Navigation via Plant Structures: In this approach, a drone simply follows the rows of plants in the greenhouse while inspecting them. This method is cheap and simple, but requires plants to be arranged in rows or clearly visible patterns.
To ensure the reliability of this method, especially in case of poor visibility or changing light conditions, it can be combined with - Assist-lines: Eye-catching coloured strings can be installed in the greenhouse to guide the drone. This provides accurate navigation, but requires an investment in infrastructure and regular maintenance.
SLAM for Crop Yield Prediction
Now that our drone is flying autonomously over the plant rows, image analysis is the next step towards crop yield prediction.
Traditionel imaging will fall short here. Drones take hundreds of high-resolution photos of a field, which can later be merged (stitching) into a 2D overview image (orthophoto). However, this is time-consuming and unreliable in greenhouses where drones fly so close to crops that leaves move and 3D effects are created.

In lieu of merging photos, we will apply"Direct Image Analysis". This involves direct detection of flowers in each individual photo. With this, a flower density map can be drawn up, from which a crop prediction can then be made by sector.

Using SLAM (Simultaneous Localization and Mapping) Technology the full potential of the drone images can be exploited. On the drone video images, we combined SLAM with individual flower detection. Thus, the exact locations of the flowers are displayed on a 3D map. This not only provides an overview of flower density, but also allows accurate localisation per flower, which is useful for further analysis. This approach can also be adapted for other crops or even the precise localisation of pests.

Innovating Forward
Autonomous drones can be a key part of modernising agriculture. Our proof-of-concept for indoor navigation in greenhouses opens up many more possibilities than just crop forecasting. Consider, for example:
- Inspection of crops in other areas, such as vineyards or orchards.
- Detection of pests and diseases through advanced image analysis.
- Linear infrastructure inspection, such as power lines and pipelines.
Thanks to innovative navigation techniques, cost-efficient consumer drones or smartphones can be deployed and, already for indoor applications, the results are promising. The application of this technology can lead to significantly improved operational efficiency and reduced costs. Although challenges remain, these developments offer hope for a more efficient and sustainable future in the agricultural sector.
