Improving localisation by measuring distances between endpoints

Localisation of people, goods and vehicles is a key factor in digitalisation. It is often only when we know where something or someone is that we can start automatic processes to interact with it. Whether it is the location of goods in a warehouse, the location of a container in a port or the location of workers in a company, there is always a demand for better ways to locate them, both indoors and outdoors. Especially in view of autonomous vehicles, this will only become more important. We therefore experimented within Flanders Make with an alternative way of localisation, by continuously determining the relative distance between all users, rather than measuring the distance between users and a number of fixed and localised anchors. A technique we would like to explain further using two applications.
Relative positioning
When we want to locate a moving object, person or vehicle, it is usually done from a number of fixed points with a known location. Like a GPS system that uses a number of satellites to determine your location on earth from the time differences between the signals received. But even in indoor locations, where GPS does not work well, the same technique is used by installing a number of measuring points at fixed locations. These fixed measurement points are called anchors, as they can anchor a moving point with respect to a known point. However, that method is pricey, as it requires a lot of man hours to precisely configure the anchors (typically 10 up to 100 of them) that perform the positioning. Moreover, these systems also lack flexibility, because once the anchors are out of range, no positioning is possible.
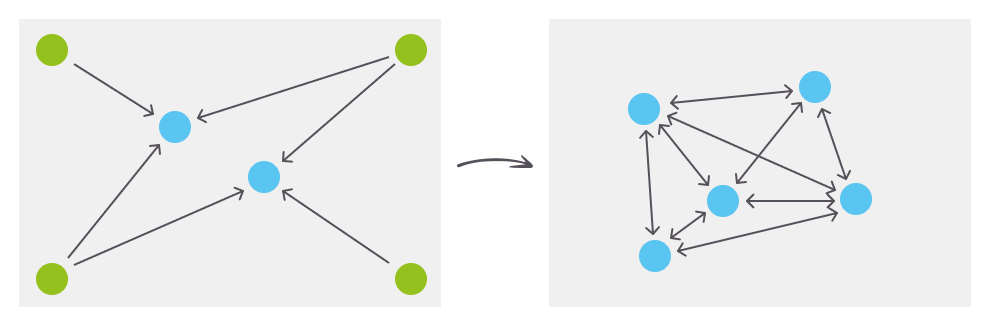
These limitations do not sound problematic in the context of a warehouse, but when, for example, a company wants to deploy drones in a variety of locations over a vast terrain, it certainly becomes a problem. Another example we encountered was when we wanted to measure the distance between colleagues throughout a company building to help them comply with social distancing guidelines during the pandemic. In both cases, a lot of fixed anchors are needed. It is in these cases that a new method can provide solutions. By measuring the distance between users themselves and collecting this information centrally, we can easily discover the relative location of all users with respect to each other, or topology. This allows us to make a rough location determination without needing fixed anchors.
Ultra Wide Band localisation
We found a first application of this technique in Ultra Wide Band localisation. We developed a new communication protocol to enable many users to use UWB to determine their relative distances without saturating the wireless medium. We could immediately deploy this technique in corona times in companies where employees struggle to follow social distancing guidelines. With a UWB tag on the hip, employees could be alerted if they unknowingly got too close to each other.

But this approach also has added value for UWB localisation with anchors. Through any-to-any communication, we can achieve the same results with fewer anchors, or significantly increase the accuracy and robustness of the system because the loss of individual measurement points has less impact on the whole network. Finally, we can also facilitate calibration by running a UWB beacon between anchors once, so that the topology of the anchors is determined from this. It then suffices to explicitly measure the position of only a few more anchors.
Sound source localisation
We were able to apply the same method together with Siemens in a wind tunnel application. Since electric cars are a lot quieter than combustion engine cars, other sources of noise suddenly become a lot more prominent. For example, the wind around the vehicle causes 30% of the noise you hear in an electric car. Certain Siemens customers active in the automotive sector, such as car manufacturers and vehicle technology research institutes, are therefore investing in wind tunnels and arrays of microphones to capture sounds around the car, locate where exactly they originate and characterise them in further detail. Siemens, for example, supplied the systems for the aeroacoustic wind tunnel of the German research institute FKFS (Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart). A recurring question among Siemens customers is to build a grid of microphones that is movable on the one hand, but can also be calibrated in an efficient way. Indeed, it is necessary to know for sure where the microphones are located in relation to the car being tested so that correct sound source localisation can be performed. The positions of the microphones must therefore be accurately calibrated (within a centimetre), which usually requires a time-consuming and/or expensive procedure every time the grid is moved.

Siemens demonstrated in a test that fast and accurate calibration is possible using the same methods of relative positioning. This procedure proceeded by playing sound from a loudspeaker at about 15 locations and then using this to determine the location of 100 microphones, relative to each other and the sound source. The margin of error could eventually be brought below 6 millimetres. This result shows that the technique is indeed applicable for the calibration of a range of microphones in wind tunnels such as those at FKFS.