AI testbed for mechatronics and robotics
We conduct research at the intersection of system identification, control and machine learning for mechatronic and industrial robotic systems. Therefore, a number of robotic hardware setups are available at one of our labs, as well as a web winding machine/physical demonstrator at TRL (technology readiness level) 5 to 6.
Locatie: FlandersMake@UGent
Industrial foil winding machine
In the light of Industry 4.0, AI-based technologies are gradually but increasingly being adopted by industry (in the fields of machine construction, energy applications, robotics and automotive applications) to preserve and increase their competitiveness.
We recently designed and built a foil winding machine (TRL 5-6) and its virtual model to validate and demonstrate novel AI-based software prototype tools & routines for system identification, condition monitoring, fault prediction and advanced control.
This physical demonstrator has been conceptualized such that it has a sufficiently broad relevance for the manufacturing industry with sufficient variability in the system parameters, which allows to generate valuable labelled sensor data required for AI applications and Digital Twin development.
The winding machine consists of a winding group, traction group, dancer, accumulator and an alignment group:
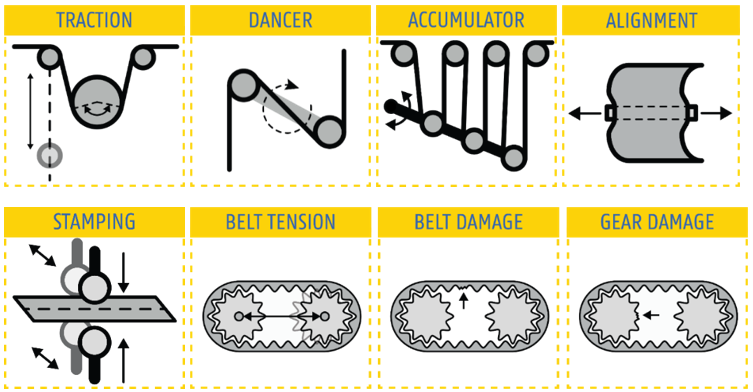
The possibility to introduce variability into the winding dynamics allows to test advanced control techniques, while variability within the winding quality allows to test decision making methods with process in the loop. Furthermore, it is also possible to introduce variable mechanical faults related to the stamping mechanism, belt transmission and bearing support to allow testing of condition monitoring tools.
What do we offer?
When adopting or developing your own new AI-based software prototype tools, for example to perform system identification, condition monitoring, fault prediction, quality control and advanced control, a physical setup is often required to validate and demonstrate your software prototype with respect to performance, robustness, efficiency etc.
Our robotics infrastructure and high-TRL industrial foil winding machine allow to do just that: we offer the opportunity for manufacturing/servicing companies to validate, mature and demonstrate their own AI-software routines on our physical robotics and web winding machine demonstrator (up to TRL 5-6) in a safe environment. This includes:
- Evaluating your software algorithms (system identification, condition monitoring, fault prediction, quality control, advanced control…) experimentally in view of performance, robustness and efficiency;
- Evaluation and support for cloud-based or edge-based design;
- Possibility to develop and test your own sim2real, impedance control (Unitree A1);
- Possibility to develop and test your own haptic control (Robotic arm assembly);
- A library of labeled experimental datasets that can be used for training, benchmarking, identification and validation purposes, including data on normal operation as well as faulty operation (through fault emulation). We can provide newly generated datasets, based on your specific needs;
- Opportunity for knowledge transfer and collaboration based on our expertise and control methods/AI toolboxes applied on your specific case;
- Upon request, the Unitree A1 four-legged robot can be rented for a limited duration.