Increase your energy-efficiency and performance with Virtual Sensing

Increase your energy-efficiency and performance with Virtual Sensing
Vehicles and machines are subject to a number of external forces and torques. Knowing those influences is of crucial importance during the development and operation phase. Data on force and torque allow for a more accurate prediction of lifetime and a reduction of safety margins, since having detailed information on the loading conditions allows for an in depth durability study. This results in a decrease of failures, lower warranty costs, better energy-efficiency and higher performance.
Unfortunately, measuring forces and torques is expensive and intrusive. It’s often not possible due to geometrical, durability or safety constraints. For example, adding a torque sensor to a driveline requires some space (which is usually not foreseen in the design), its installation modifies the dynamics and the power flow of the driveline, cables for power supply and data transmission even bring in further issues. The solution is virtual sensing.
Virtual sensing aims at accurate and reliable indirect force and torque measurements. This is possible by exploiting the combination of a physics-based model of the system and easy to deploy measurements such as position, velocity and acceleration, from sensors that are inherent to the system.
Embedded deployment of a virtual sensor
For many practical applications in industry, the virtual sensor needs to run in real-time on a small embedded computer. The code needs to be optimized to guarantee this computer generates the required accuracy. For this reason, we developed a co-design method to determine the optimal compromise between estimator performance and real-time hardware constraints. This involves a re-structuring of the software (with the possibility to parallelize processes) and techniques to co-simulate a model of the embedded platform with a model of the software.
Three applications of virtual force and torque sensing
1.Torque information on mechatronic powertrains
We exploit a generic physics based model of a drivetrain with an extended Kalman filter estimator.
The graph below shows the results of the torque estimation. The blue curve is the estimated signal, the grey the reference signal, obtained by direct torque measurement.
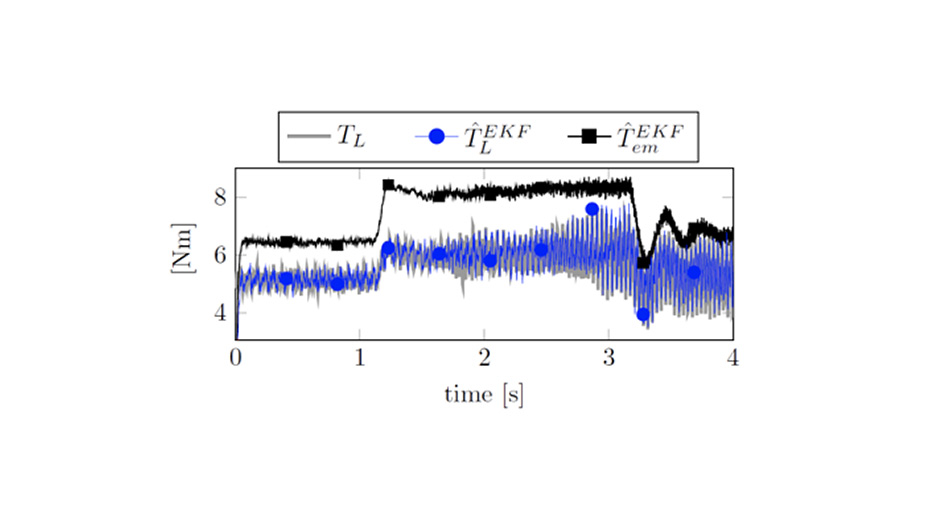
Different sensor sets result in different estimation accuracy of the torque. For example, the black curve shows the results of a virtual sensor using exclusively measurements of electrical quantities, whereas the blue curve includes also acceleration measurements of the powertrain.
Watch a video of our mechatronic powertrain here.
2. Virtual sensing for sideslip angle and tire force estimation
Modern vehicles are equipped with advanced driver assistance systems. Such systems perform better if they have accurate information about the state of the vehicle, such as the vehicle’s sideslip angle and the tire forces. However, these quantities are very challenging to measure, requiring costly and intrusive sensors. Virtual sensing offers a cost-effective alternative, as it can estimate these quantities from sensors that are already available in modern vehicles and a physics-based vehicle model.
We instrumented a test vehicle with high-cost sensors for the sideslip angle and tire forces to compare our estimates with. Challenging maneuvers were performed under different conditions to show the robustness and accuracy of the virtual sensor.
The graph below shows the results of the sideslip angle estimation for a slalom maneuver on a road with variable friction.
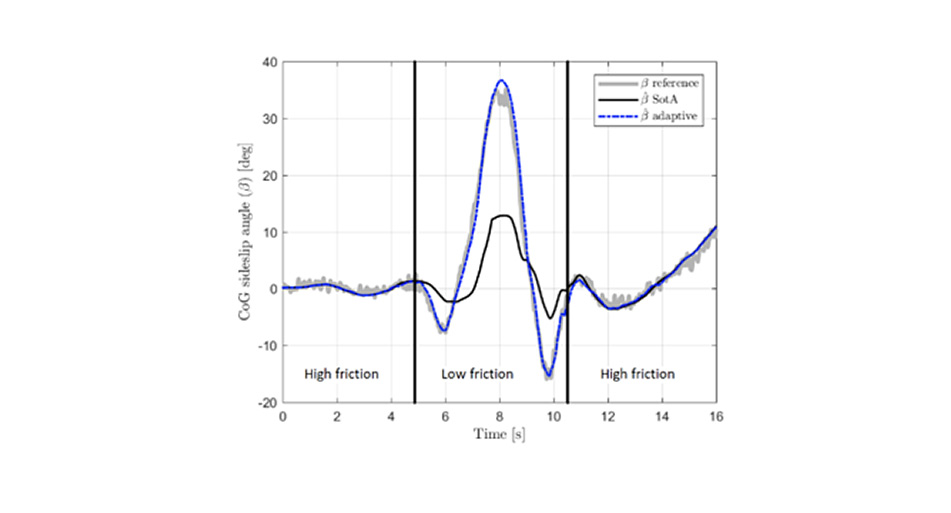
The estimated sideslip angle (dash-dotted blue line) has an error of only 1.1 degree (RMSE) with respect to the reference measurement of the high-cost sensor (thick grey line).
3. Torque estimation for electric motors accounting for temperature effects
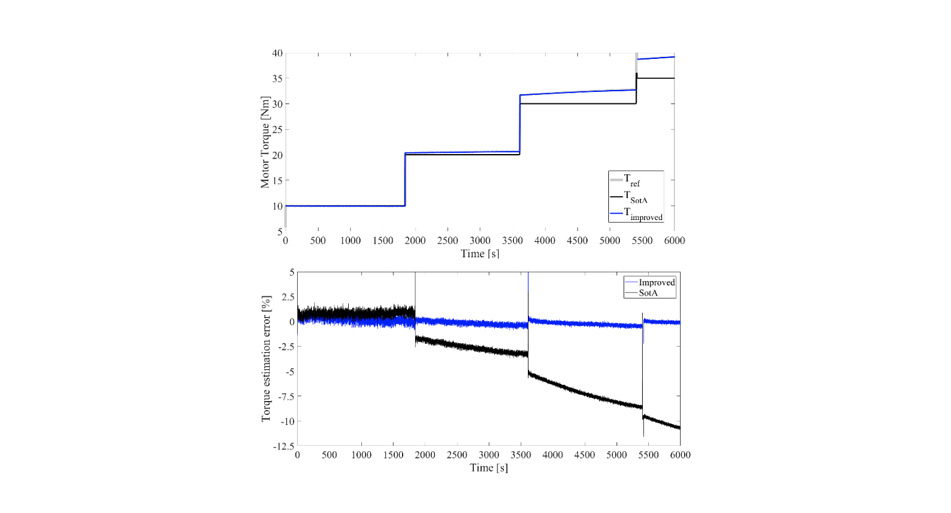
In electric motors, accurate knowledge of torque is important to maintain the output torque in a reasonable range and to enhance operating efficiency. Motor torque is typically estimated under the assumption that the rotor resistance is constant over time. However, temperature affects the rotor resistance, leading to torque estimation errors of over 10%.
We developed a virtual sensor for the motor’s rotor temperature based on an easy to identify thermal motor model and a measurement of the stator windings’ temperature (using a single, standard issued sensor). By combining the rotor temperature estimate with our developed electrothermal motor model, we are able to accurately estimate the motor torque, taking temperature effects into account. This approach can be applied to induction motors of all power ratings with vector control, after performing a simple calibration.
Flanders Make and virtual sensing
Flanders Make developed the virtual sensing technology in collaboration with Siemens Industry Software, Bekaert, Atlas Copco Airpower, ZF Windpower, Vandewiele, Dana and Tenneco. The industrial partners got onboard to work on the shared technological challenge of assessing torques and forces without adding costly and intrusive dedicated sensors. The companies are now working on the integration of the technology in their own products and production processes.
Flanders Make offers methods and tools to design, calibrate and validate model-based sensors. We have in-depth knowledge of industry sensors and can offer support for the deployment of virtual force and torque sensors.
