Improving the overall bandwith of torque control in drivetrains by reducing torque ripple

Improving the overall bandwith of torque control in drivetrains by reducing torque ripple
In many applications, controlling the torque of a drivetrain is very important. The dynamics of the torque control, mainly limited by the current control, affect the achievable bandwidth of speed controllers and, as a result, have an impact on how fast/smooth trajectories can be followed. Besides obtaining a fast torque response, the quality (i.e. is it ripple-free or not) of the achieved torque is also important. Torque ripple is the periodic increase or decrease in output torque as a shaft rotates and is caused by, for example, the interaction between the current and the resulting counter-electromotive force in an electrical machine. However, torque ripple can also have an origin outside the electrical machine, caused by oscillating masses, system flexibilities, the discrete combustion times of an internal combustion engine (ICE), etc. Reducing torque ripple is an important objective for almost all drivetrain manufacturers as it affects lifetime, performance, cost (oversizing of components), user comfort and sound radiation.
There are many ways to reduce torque ripple.
- You can optimise the design of your drivetrain and its components (varying dimensions or adding inertia), or
- you can add emerging components like a magnetic spring, or
- you can optimise the set point and control strategies of your drivetrain’s components.
In this blog, we apply the latter strategy to demonstrate how we can reduce the torque ripple of an existing drivetrain equipped with a permanent magnetic synchronous machine without further design changes.
How does torque ripple reduction work?
To reduce torque ripple through optimised set points and control strategies of drivetrain components, we’ve developed a method with the following steps:
- We define a data-driven model that we use to predict the torque (and its ripple) as a function of the rotor position and the currents flowing through the windings. Both measurements (from a torque sensor) and an accurate finite element model, including position dependency, can be used to set up this model.
- Based on this data-driven model, we determine current set points (a priori and saved in look-up tables) that reduce the amplitude of specific frequency components of the resulting torque ripple.
- We inject current harmonics to reduce torque ripple as defined in step 2.
Practical application of the technique to reduce torque ripple
Based on these three steps, we calculate for a given operating point of the motor (torque and speed) what the current set point should be while the rotor shaft is rotating. However, as many industrial applications in which torque ripple is an issue are driven at high rotational speeds, these current set points tend to have high-frequency components. Moreover, the higher the speed, the higher the frequency and thus the higher the required bandwidth of the current control. That is why proportional integral (PI) controllers, which are typically used for current control, do not suffice in this application. To overcome this issue, we’ve developed and applied innovative solutions using resonant and iterative learning controllers.
In the following two examples, we demonstrate the effect on motor torque and overall dynamics. The examples and methodology are discussed in detail in the Heurisko webinar on torque ripple reduction:
1. Reduction of the inherent motor torque ripple
On the graph below, we depict the generated torque (measured result). The reduction is made clear in terms of time (left) and frequency domain (right). The frequency domain reveals a distinctive 36th harmonic (motor contains 36 stator slots) that we can significantly reduce by injecting current harmonics.
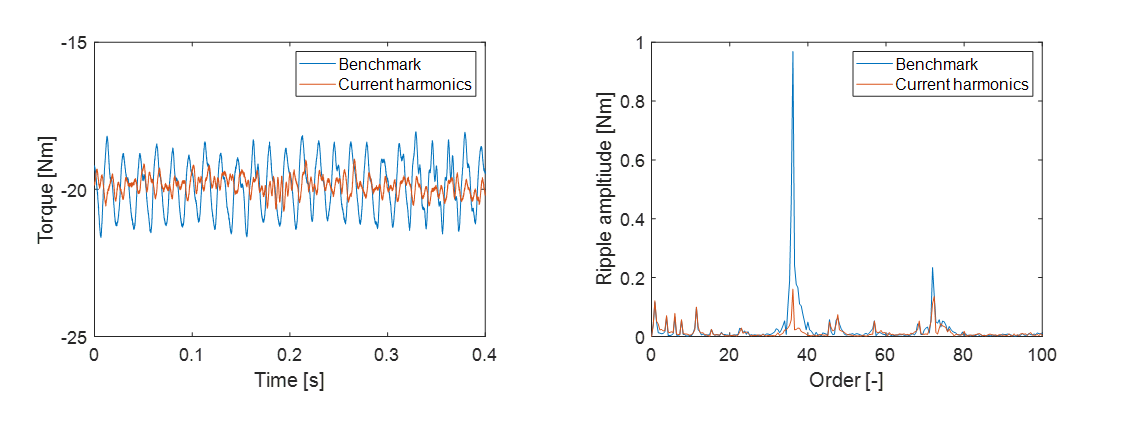
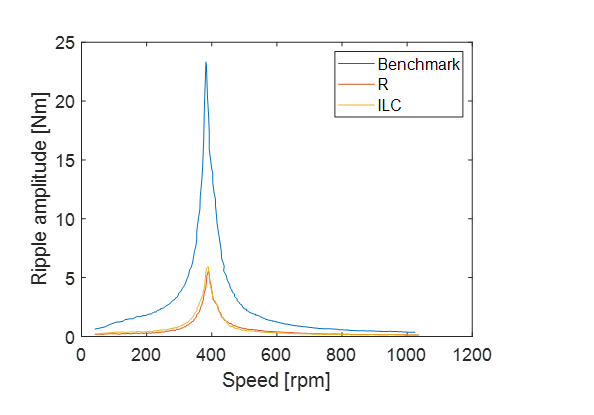
The reduction in inherent torque ripple in the above-presented case amounts to circa 83%. A consequence of this reduction is that both the drivetrain and the structure or system supporting it are less excited by torque harmonics. This is shown in the example below, where a speed sweep in loaded condition (load torque of 50Nm) is performed on a test bench with 2 motors (back-to-back). Whereas without reduction techniques, the resonance reaches a peak torque amplitude of 23Nm, reduction techniques can limit this to 6Nm. In the figure below, R stands for resonant control while ILC stands for iterative learning control.
2. Dynamic response
So far, we have showed only (quasi) static results, meaning a fixed operating point is chosen and for that operating point, torque ripple is minimised. When applied in real applications, dynamic variations will occur. Therefore, the developed methodology should also be able to work during these events.
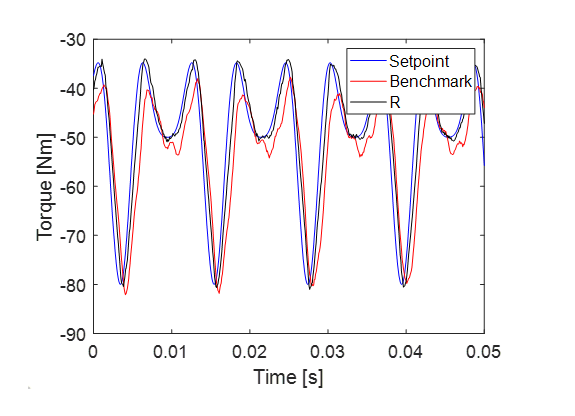
To demonstrate the capabilities of this method, we’ve programmed a varying load with a harmonic content between 75 and 250Hz. This means that the control continuously needs to adapt. The results show that the standard control has difficulties to follow the torque set point. On the other hand, the control combining the torque ripple reduction method with resonant control is able to track the set point closely. This means that not only the torque ripple has been reduced, but the overall performance of the controller has improved as well. This is, in particular, an asset for systems with highly varying loads (e.g. weaving looms). Another application where increased dynamic response is of added value is the active reduction of torque ripple coming from an ICE in hybrid electrical vehicles.
Flanders Make and torque ripple reduction
Flanders Make has developed this torque ripple reduction technique in collaboration with Siemens Industry Software and Dana. The industrial partners got on board to work on the shared technological challenge of torque ripple reduction based on low-level motor control.
We offer methods and tools to reduce torque ripple, both at component (i.e. motor) and system level. We have experience in modelling and testing electrical machines and in their implementation in the overall system.
